


- sales/support
Google Chat: zj734465502@gmail.com
- sales
+86-0755-88291180
- sales01
sales01@spotpear.com
- sales02
dragon_manager@163.com
- support
services01@spotpear.com
- CEO-Complaints
manager01@spotpear.com
- sales/support
WhatsApp:13246739196
RS485 CAN for Jetson Nano User Guide
Overview
RS485 CAN Expansion Board for Jetson Nano.
Features
- Standard 40PIN GPIO extension header, supports direct attaching to Jetson Nano.
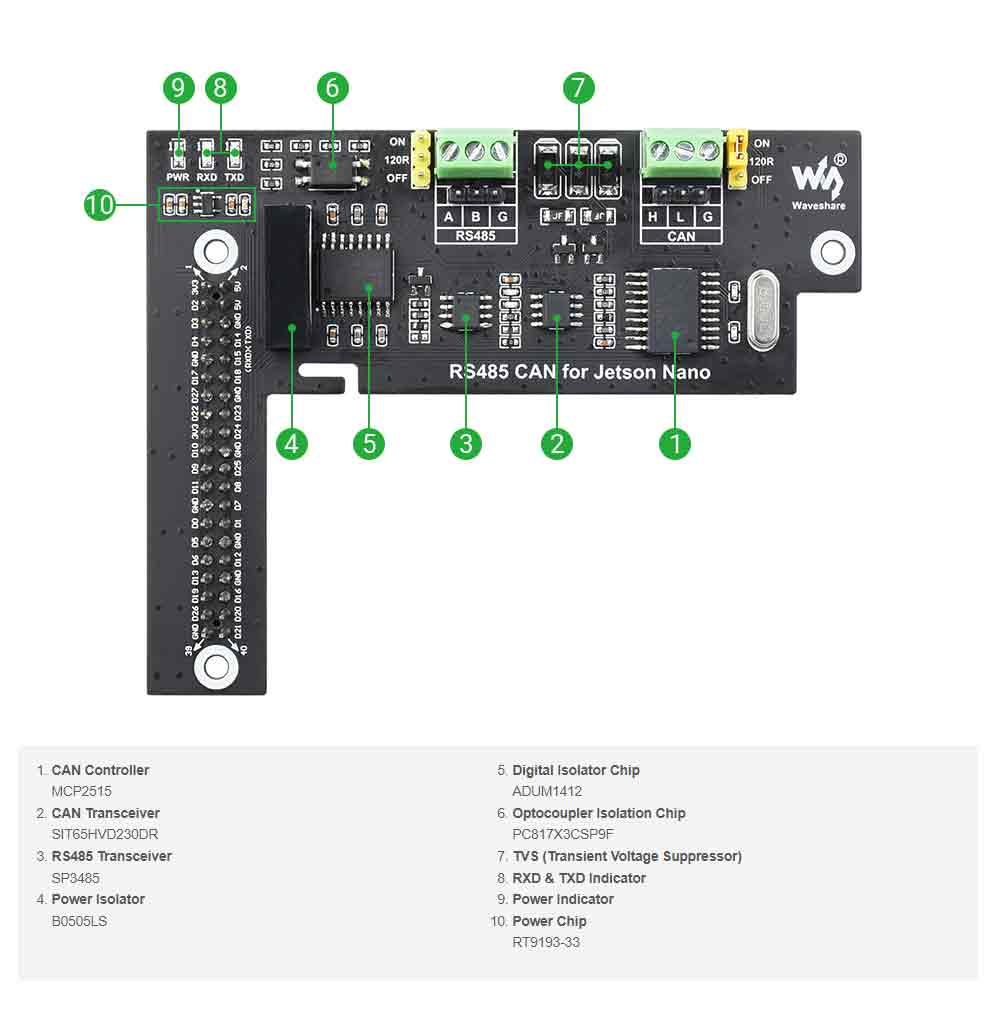
- Onboard CAN controller MCP2515 via SPI interface, matching with SIT65HVD230DR transceiver.
- Features RS485 function, controlled via UART, half-duplex communication, supports automatic TX/RX control without programming, onboard transceiver SP3485.
- Onboard TVS (Transient Voltage Suppressor), effectively suppresses surge voltage and transient spike voltage in the circuit for RS485 transceiving, lightning proof & anti-electrostatic.
- Onboard digital isolation chip, safer signal isolation communication, and better stability and anti-interference
- Reserved control pins, allowing working with other control boards.
- Comes with development resources and manual (examples in python).
Specification

How to Connect
What's On Board
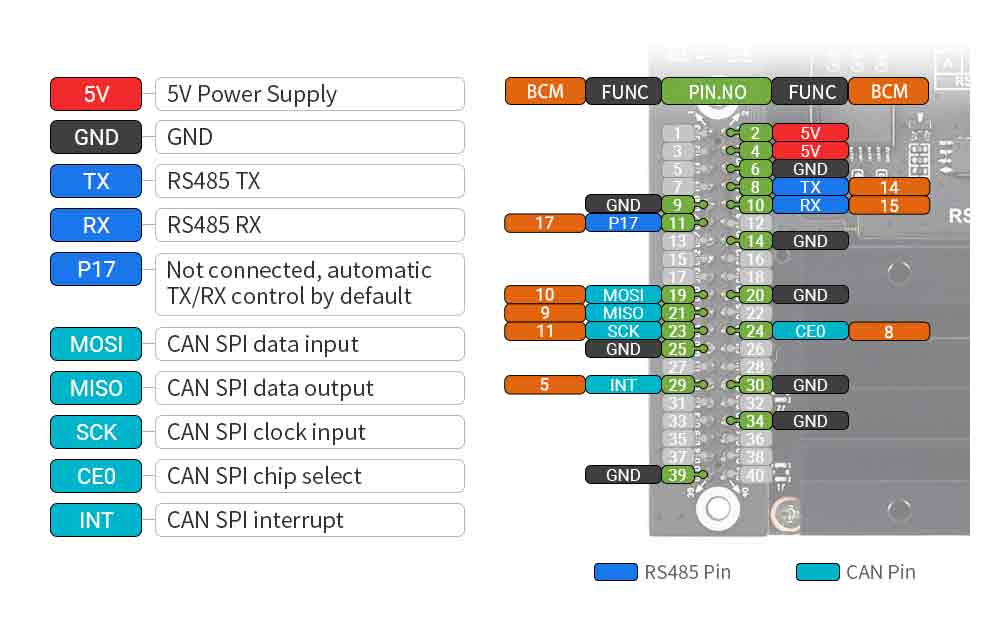
Pin Definition
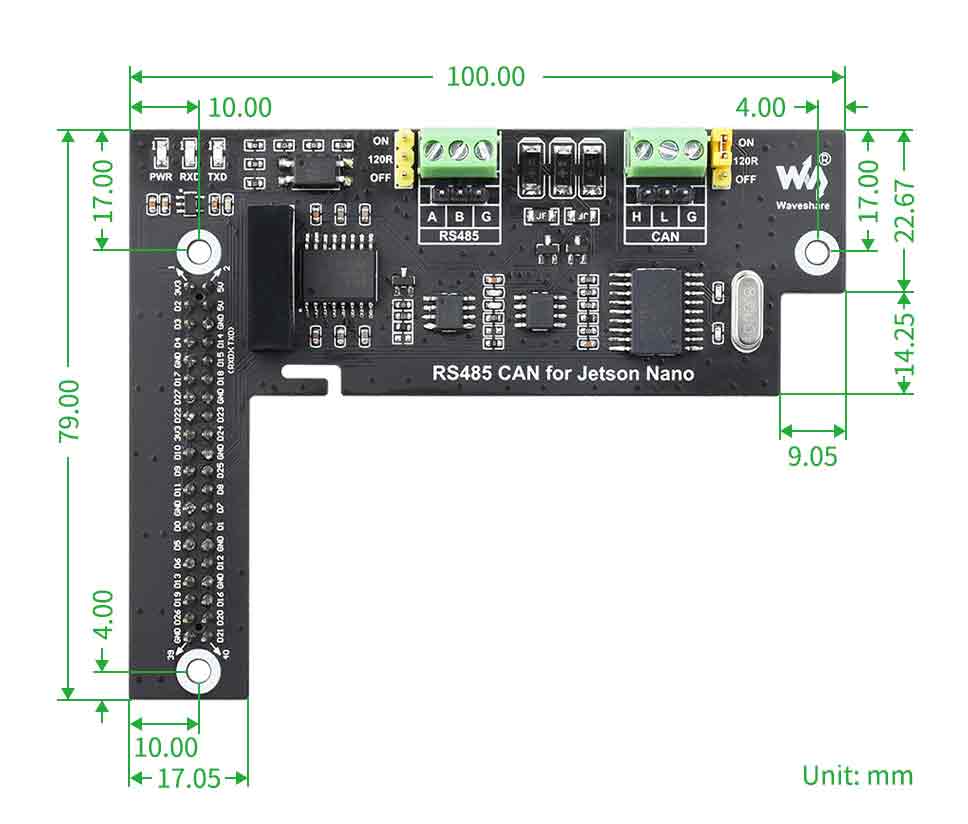
Dimensions
How to Use
Install Libraries
sudo apt-get install minicom sudo apt-get install python-pip nano sudo pip install pyserial sudo pip install spidev==3.1
Enable SPI
After executing the above, add in the following file:
sudo nano /etc/modules-load.d/modules.conf
add a line
spidev
Press ctrl+x and then press Y, press Enter to save and exit, and then open the hardware SPI:
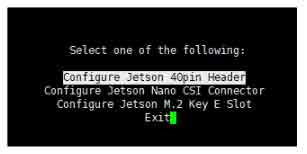
sudo /opt/nvidia/jetson-io/jetson-io.py
as shown
Choose to configure 40PIN pin
Use the keyboard to select, configure the pins
Use the keyboard to select, move to SPI1 and press Enter to confirm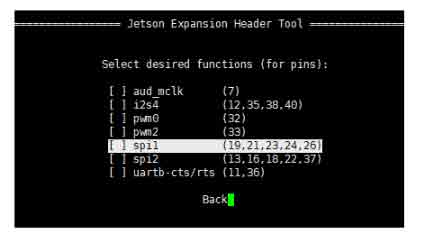
Save and select restart (keep Enter to restart)
After restarting, ls /dev/spidev* can see the device number
Download the Sample Demo
In the user main directory, execute the following command:
wget https://www.waveshare.com/wiki/File:RS485_CAN_for_JetsonNano_Code.zip sudo unzip ./RS485_CAN_for_JetsonNano_Code.zip -d ./RS485_CAN_for_JetsonNano_Code/
CAN
Please connect the hardware first, and then run the program. As SPI to CAN and the default crystal oscillator is 8M, the temporary baud rate is 500Kbps.
The Python driver provided by this product currently supports a baud rate of 500Kbps (the default is 500Kbps), pay attention to select the baud rate of the other end of the communication:
cd RS485_CAN_for_JetsonNano_Code sudo python cantest.py
The test demo will send 1-8 when a message is received;
485
Please connect the hardware first, and then run the program. RS485 is transferred from UART, so please do not occupy UART.
sudo python rs485test.py
