



- sales/support
Google Chat:---
- sales
+86-0755-88291180
- sales01
sales@spotpear.com
- sales02
dragon_manager@163.com
- support
tech-support@spotpear.com
- CEO-Complaints
zhoujie@spotpear.com
- Only Tech-Support
WhatsApp:13246739196
- Purchase/Shipping/Refund
WhatsApp:13424403025
Pico-Get-Start-Windows
Windows Environment Setting Tutorial
- This tutorial is applicable to the Raspberry Pi Pico and the RP2040 series development board developed by our company.
- The default development environment is Windows for example (the Raspberry Pi can be installed with the official installation script).
C/C++ SDK
You need to install the corresponding toolchain are:
- Arm GNU Toolchain (You need to install the corresponding version, such as Windows needs to install the file with the suffix -arm-none-eabi.exe.)
- CMake
- Visual Studio 2022
- Python 3.10
- Git
- Also, we have packaged the installation package and uploaded it to our server.
- You can click here to download the installation package.
How to Install
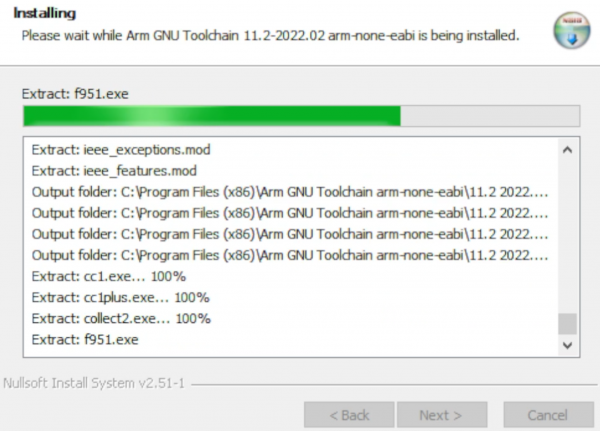
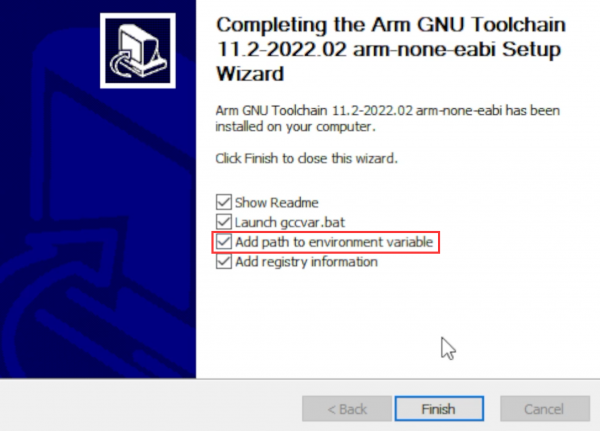
Arm GNU Toolchain
- Select language.
- Enter the installation wizard.
- Agree to the user agreement and continue.
- Select the installation address.
- Wait for the installation to complete.
- Note: Check the option in the red box in the picture.
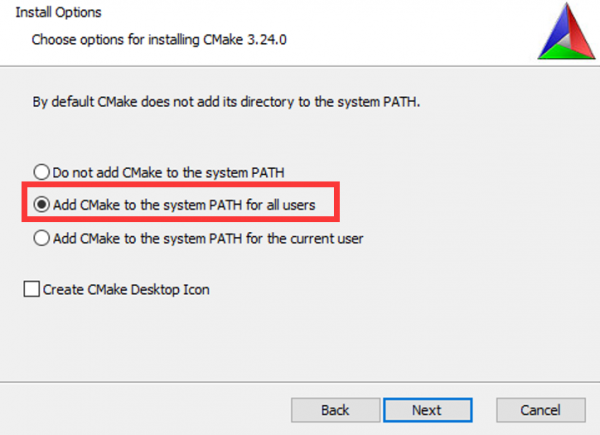
CMake
- Enter the installation wizard.
- Agree to the user agreement and continue.
- Add CMake to the system PATH for all users.
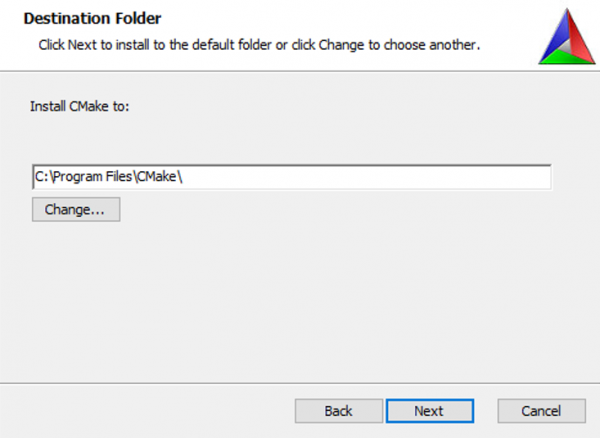
- Select the installation location.
- Enter to install.
- Finish.
Python
- Enter to install and check tp add PATH.

- Wait for installation.
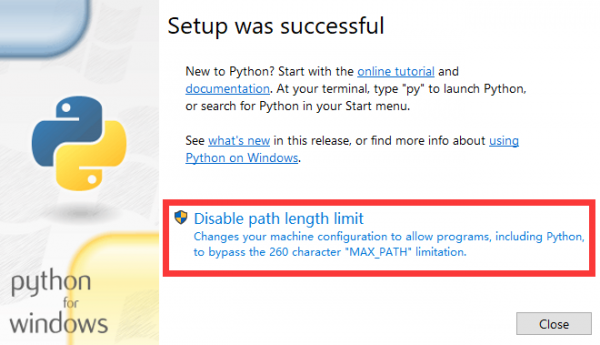
- Friends who have the options in the red box can click to disable the PATH length limit.
Git
- There are many installation options for Git and the length is relatively long. Here we only point out the recommended modification parts, and the default settings for the rest of the options are recommended.
- Choose an installation location.
- Choose Git default editor (here I choose VS Code).
- Next, keep the default settings, select Next, and finally the installation is successful.
Visual Studio 2022
Visual Studio 2022 installation is very linear, just note the following one point.
When selecting a build tool, select the C++ tool in the figure: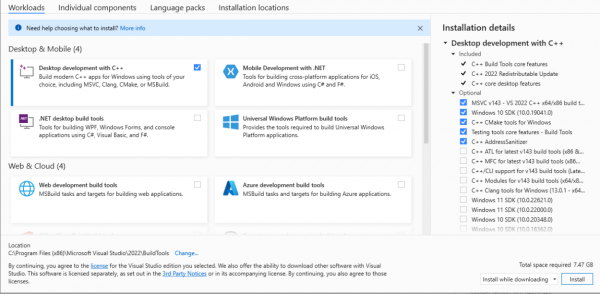
Get and Compile the Demo
Get SDK Demo
In the folder where you want to download the SDK, Shift + right click -> select "Open powershell here" and enter the command:
git clone -b master https://github.com/raspberrypi/pico-sdk.git cd pico-sdk git submodule update --init cd .. git clone -b master https://github.com/raspberrypi/pico-examples.git
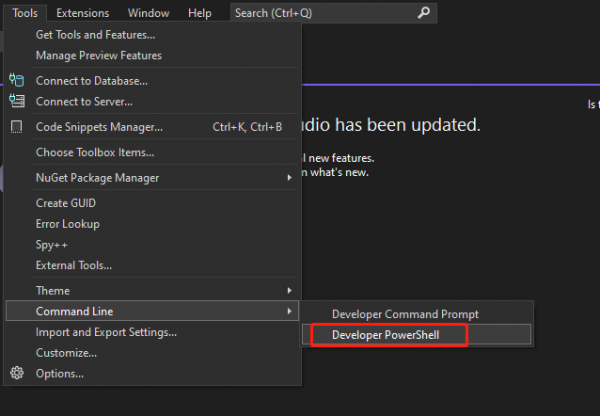
Set the Environment and Compile
- Open your VS 2022 -> Tools -> Command Line -> Developer PowerShell.
- Set the absolute address of your pico-sdk to PICO_SDK_PATH, for example, my pico-sdk address is "D:\pico\pico-sdk".
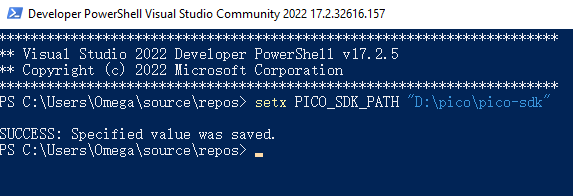
- Jump to the folder where pico-examples is located, create a build folder and compile.
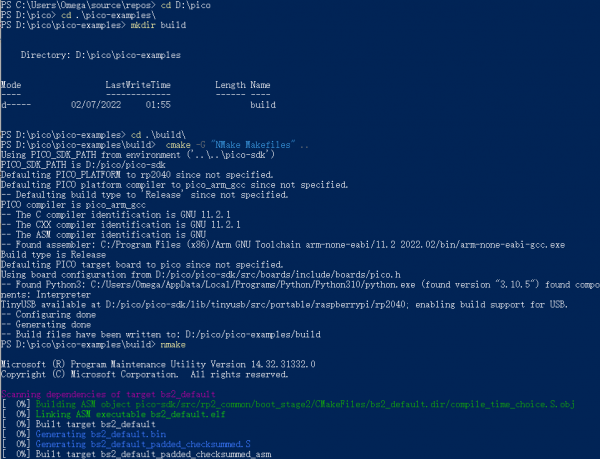
- Just wait for the compilation to complete (note that all demos are compiled here, so the compilation time is a bit long).

- The following are all instructions:
setx PICO_SDK_PATH "..\..\pico-sdk" cd pico-examples mkdir build cd build cmake -G "NMake Makefiles" .. nmake
Download the Firmware
Select the demo firmware you need to download, and drag it into the memory simulated by pico:
TAG:
ESP32 C3
Raspberry Pi Pico 2 RP2350 Pico2 ARM Cortex-M33 And RISC-V Hazard3 520KByte 4MByte QSPI Flash
ESP32 ST7789
Raspberry Pi 7 inch DSI MIPI LCD TouchScreen Display 7inch 720x1280 For Luckfox Lyra RK3506/ESP32-P4/Luckfox Omni3576
Mini Uninterruptible Power Supply module Supports charging And Power output at the same time 5V 2.5A
Raspberry Pi 3 LCD HAT
Jetson Orin Case
Raspberry Pi 5 PCIe TO Gigabit RJ45 ETH Adapter Board (C) Driver-Free RTL8111H For Pi5
Arducam CSI-to-HDMI
ESP32-S3N8R8 7inch LCD Display TouchScreen 800×480 WiFi Bluetooth CAN RS485 Sensor
ESP32 S3
ESP32-AI Series User Guide
Spotpear
Industrial USB TO RS485 Isolated Bidirectional Converter Original FT232RNL 1200m Long Distance
LuckFox
Raspberry Pi Pico 2 RP2350 bit board Size & Port high Compatible With BBC Micro:bit
UART To CAN
Luckfox Pico ST7789
Lichee-Tang-Primer-20K-FPGA-Unboxing
D-Robotics RDK X3 Development Board Horizon Sunrise Pi ARM Cortex-A53 5Tops 2GB/4GB RAM

TAG:
Luckfox Titan RK3576 IMX415 IR-CUT Camera
Raspberry Pi Fisheye Camera IMX378 12.3MP 190° Wide Angle Roller shutter
Servo Motor RS485 RSBL35-24-HS
Jetson Nano Development Board IO-BASE-A For JETSON NANO B01
Raspberry Pi 5 Camera Cable
Raspberry Pi 5 PCIe to M.2 NVME and PCM5122 I2S DAC HIFI Expansion Board Driver-Free
Pi5 Heatsink
Industrial Isolated USB TO 4CH RS485 BConverter UART CH344L
RDK X3 Case
Raspberry Pi CM4
4 inch e Paper HAT+ E Ink Spectra E6 Full-Color 600x400 Screen Display Arduino Raspberry Pi Jetson Nano STM32
RoArm M3 5 Robotic Arm ESP32 Servo
Raspberry Pi Pico 2 RP2350 LCD 0.96 inch Displayscreen RP2350A
Raspberry Pi Pico 2 RP2350A 1.54inch TouchScreen 1.54 inch LCD Display Development Board 240×240
ESP32-S3FH4R2
MP2.5G Raspberry Pi 5 PCIe 2.5G Ethernet Pi5 RTL8125
ESP32-S3 AI E-Paper Ink Screen 7.3-inch E6 Full-Color Electronic PhotoPainter Frame Deepseek
Raspberry Pi 7inch HDMI LCD C Display 1024x600 Capacitive TouchScreen
Raspberry Pi5 PCIe M.2 MINI Gen2 Gen3 SSD 2230 2242
Serial UART Magnetic Encoder Bus Servo TTL ST3235 30KG.CM High Precision Large Torque